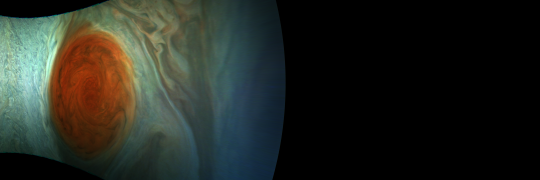
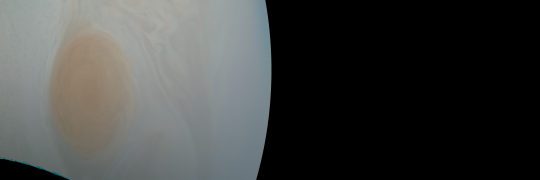
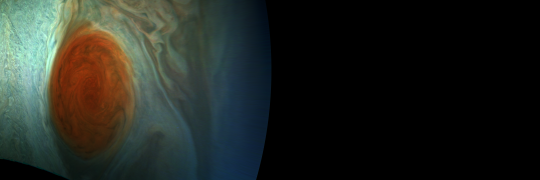
Upload 2017-07-26: JunoCam Perijove 07 RGB Images of the Great Read Spot, Cropped Cylindrical Maps 180 Pixels Per Degree
The cylindrical maps are presumed to be cropped to between -30 and +30 degrees latitude planetocentric, and to between 230 and 250 degrees longitude west L3.
A pixel in the fully resolved maps corresponds to a square of an edge length of 1/180 degree, or 20''.
Geometric camera calibration and pointing is approximate. The residual error in unknown.
Color adjustment of the decompanded and linearized raw values is by relative linear radiometric weights of 0.82 for red, 1.0 for green, and 2.17 for blue, according to preliminary lab calibration.
This results in a greenish cast relative to "natural" appearence. A weight of 0.88 for red would have resulted in an appearence closer to "natural".
Color calibration is recommended to be considered tentative.
Columns
Cylindrical maps, 180 pixels per lon/lat degree, map of assumed bad camera pixels.
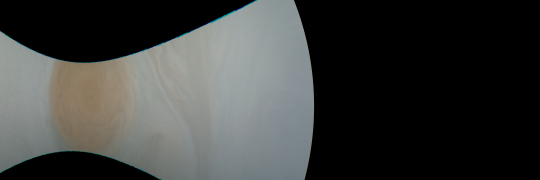
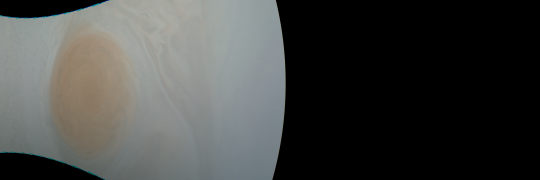
Cylindrical maps, 180 pixels per lon/lat degree, decompanded, color-adjusted, square-root encoded, assumed bad pixels patched as far as considered plausible.
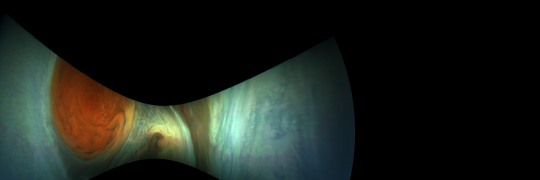
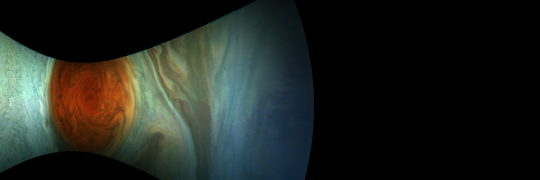
Cylindrical maps, 180 pixels per lon/lat degree, decompanded, color-adjusted, approximately illumination-adjusted according to an undocumented ad-hoc heuristics based on solar incidence and emission angles, gamma-stretched to 4-fold radiometric values, assumed bad pixels patched as far as considered plausible.
Cylindrical maps, 180 pixels per lon/lat degree, square root of cosine of solar incidence angle.
Cylindrical maps, 180 pixels per lon/lat degree, square root of cosine of emission angle.
Reference mask to check matching between Jupiter spheroid model and JunoCam image.
(Some of the applied SPICE kernels are proprietary, and not referenced here. Released SPICE kernels are available and might be applied in a future revision.)
-
Applied decompanding table:
This table is documented in the JunoCam SIS provided by NASA's Planetary Data System.
Terms of Use
The images are allowed to be treated as being in the public domain.
However, crediting the images to "NASA / SwRI / MSSS / Gerald Eichstädt",
appears appropriate.
Add your name or data sources to the credit list, whenever you create derived works.
Downloading, viewing, distributing the files, as well as creating derived work is on your own risk.